http://gpspp.sakura.ne.jp/paper2005/igs ... rtklib.pdf
Gruss
Bernd
Moderator: Roland
Die EUREF-Station ist ca. 200km entfernt, in Wettzell im Bayerischen Wald (wir sitzen in Weyarn, 30km südlich von München).das geht natürlich garnicht, mit den doch sehr eingeschränkten Antennenstandorten!
Wie weit ist denn die EUREF-Basisstation entfernt?
Bei unseren L1-Empfängern sollte die Entfernung Basis <--> Rover nicht mehr als 10km betragen, nochdazu in kinematischen Echtzeitanwendungen!
Ja, ich habe einen ublox als Rover, einen als Basis und Korrekturdaten von Euref.Hast du schon mal getestet, was passiert, wenn du einen ublox als Basis-Station nutzt und den anderen als Rover?
Von der Groundplate habe ich hier im Forum schon gelesen, daher habe ich die Antennen auf Marmeladenglasdeckel (mit 7,5cm Durchmesser) gesetztDu solltest mal die Antennen auf Blechscheiben mit 7-10cm Durchmesser setzen und das ganze Gebilde 2m überm Boden aufstellen.
Wenns dann später mal auf dem Dach o.ä. montiert wird, brauchts den 2m-Mast natürlich nimmer.
So wie du mir das schilderst, macht dir derzeit Multipath/eingeschränkte Sicht jeden Erfolg zunichte.
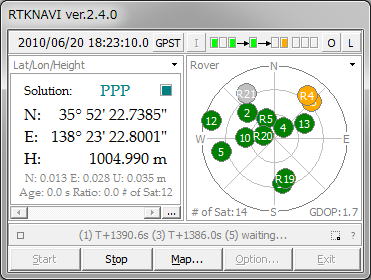
Ich denke schon, ich habe nach den ersten Versuchen (mit RTKLIB 2.3.0) mit 2.4.0 wieder alles auf Default gesetzt (indem ich die c:\windows\rtknavi.ini gelöscht habe) und dann nur noch mit den Parametern Rec. Dynamics, Earth Tides Correction, Ionosphere Correction, Troposphere Correction and Satellite Ephemeris/Clock experimentiert.In RTKLIB werden die wichtigsten Einstellungen ja stimmen?
Ja, da werden wir sicher nicht sparen, das rächt sich im Normalfall später immer.ssquare_de hat geschrieben:Wenns dann endgültig wird, kann ich dir die Trimble-Antennen nur empfehlen...hauptsächlich wegen deren mechanischer Robustheit, Wetterfestigkeit, Kabelabführung...ein bischen Genauigkeitsgewinn gibts obendrauf als Zuckerl...
Auch bei den Stecker und Antennenkabel bitte nicht sparen, das "Kleinzeug" ist ebenfalls wichtig, wenns um Zuverlässigkeit geht.
Und so teuer sind da gute Produkte nicht.
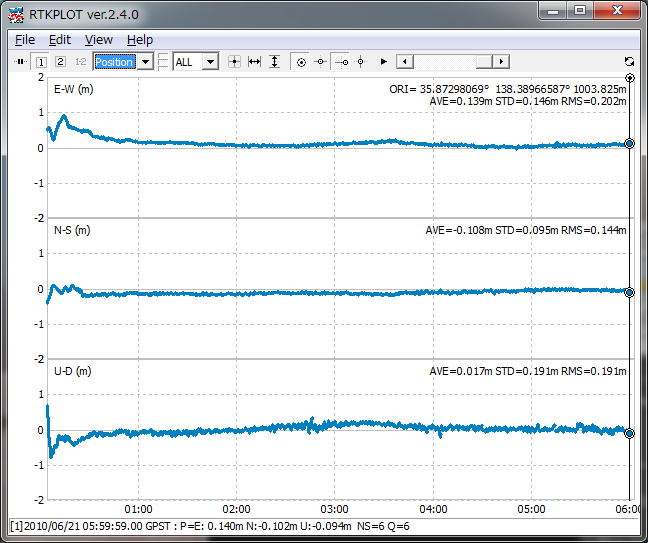
Ja schon, aber ich habe festgestellt, daß es die Einschwingvorgänge proportional verlängert. Das bringt mich gleich zum nächsten Problem: STRSRV stellt ja nur den Datenstrom vom Empfänger den RTKNAVI-Prozessen (wenn man mehrere Rover hat) zur Verfügung, aber es berechnet nicht die Korrekturdaten. Dadurch laufen die Einschwingvorgänge bei jedem Start von RTKNAVI neu.ssquare_de hat geschrieben:Hast du die Update-Rate deiner ublox-Receiver auf 5Hz hochgesetzt?
[ ... ]
...auf der anderen Seite treibts die Rechenlast in die Höhe, stellt später erhöhte Anforderungen an die Funkstrecke und sooo schnell werden die Stapler ja nicht gabeln...
